Project Description
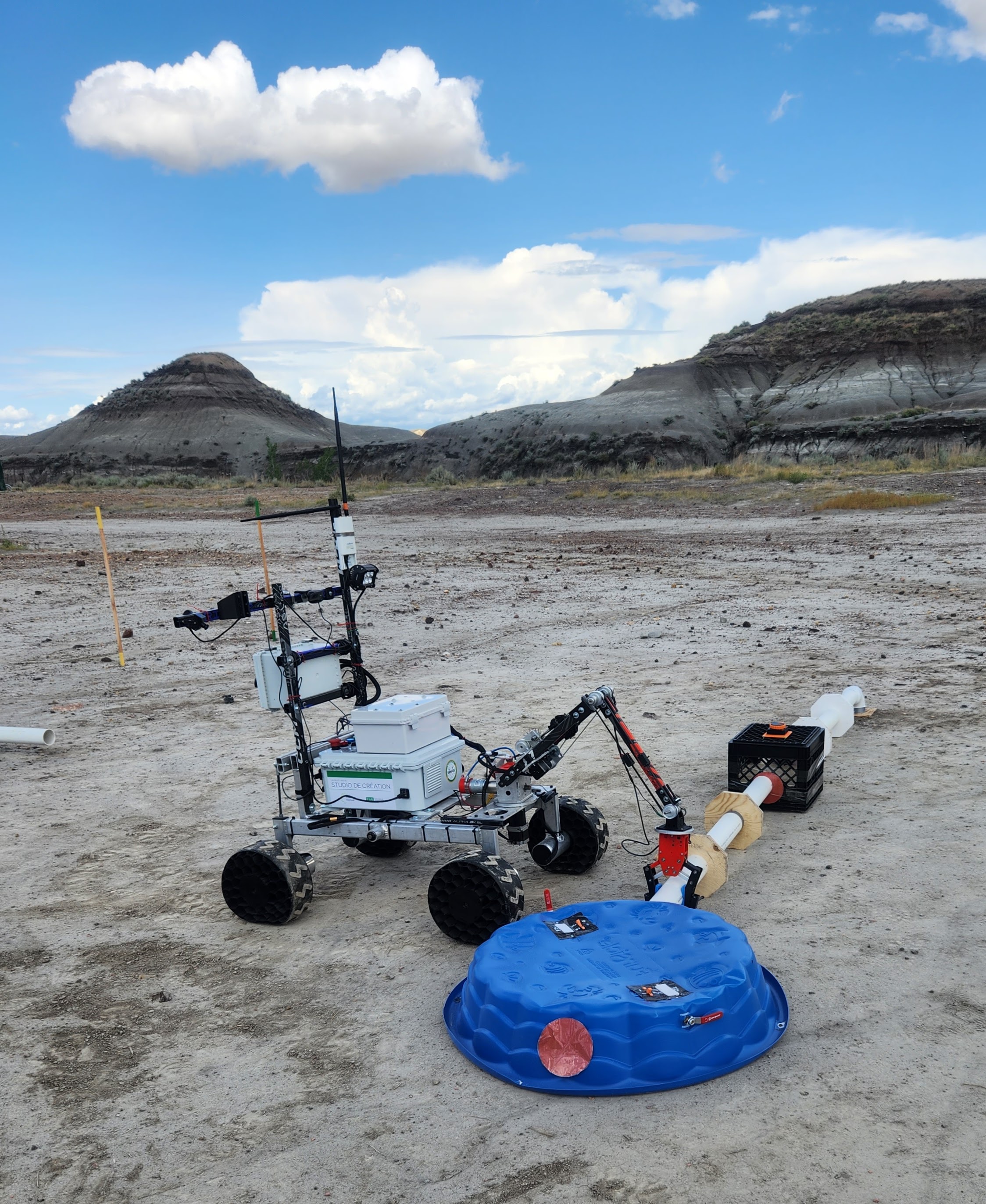
As the Project Director of Team Rovus, I led the design and integration of a competition-ready Mars-style rover, managing both technical development and team coordination. I directly supervised 10 mechanical designers within a team of over 30 students across robotics, electrical, mechanical, and software engineering.
Over multiple competition seasons, I contributed to the design and iteration of major subsystems, including the robotic arm, rocker-bogie suspension, and wheel assemblies, ensuring all components were designed with DFM/DFA (Design for Manufacturing & Assembly) principles in mind.
Results:
🥇 1st place – CRQRC 2024
🥉 3rd place – CRQRC 2025
🏅 5th place – CIRC 2023 & 2024
Key Points
Project Management
- Led a 30-person team; directly managed 10 mechanical designers
- Used GitHub Projects for task tracking and sprint planning
- Coordinated integration across mechanical, electrical, and software
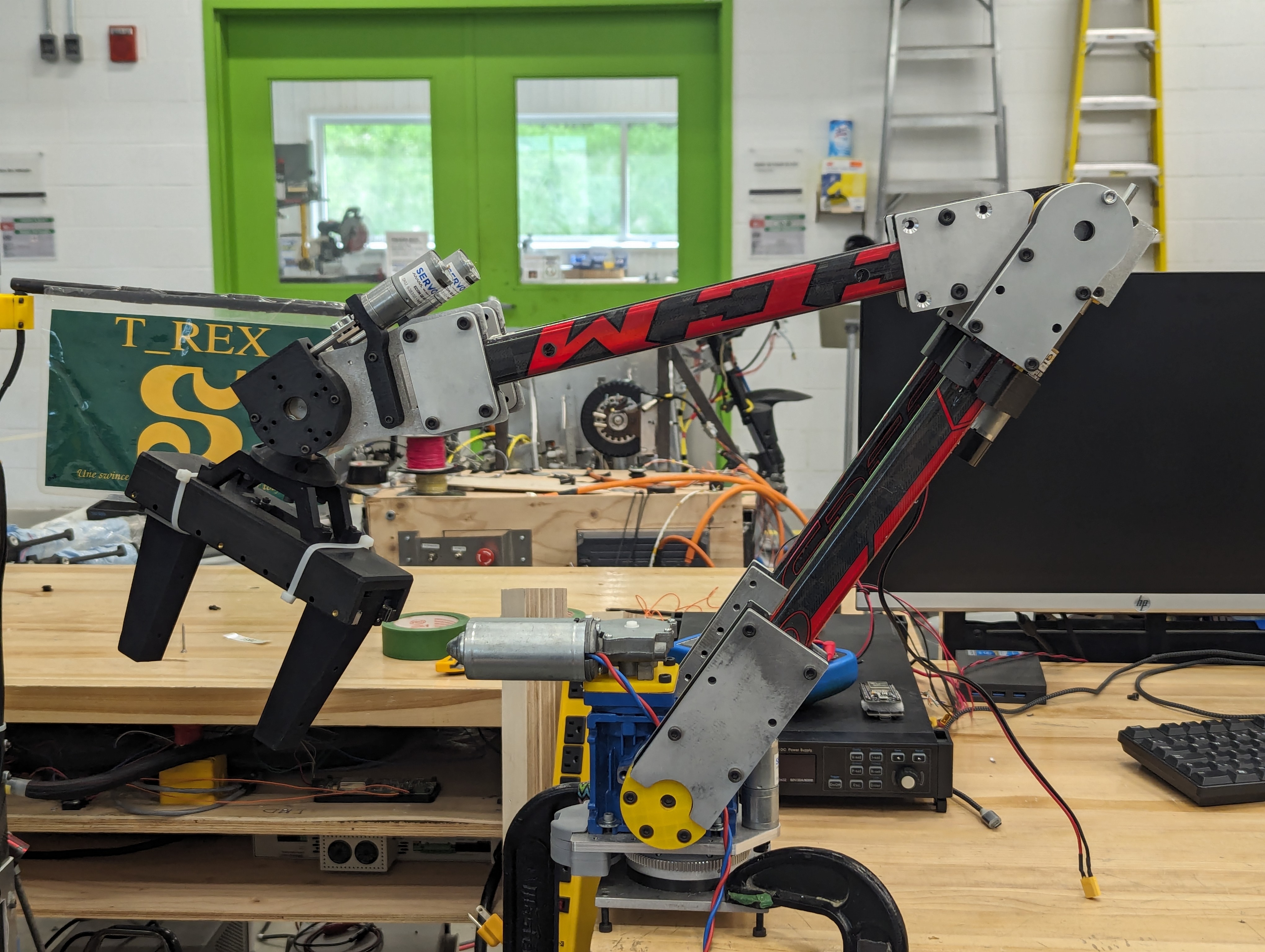
Robotic Arm & Mechanical Design
- Designed 3 arm versions focused on weight, cost, precision, and DFM/DFA
- Used Onshape for 3D design, motion and load simulations
- Sized DC, BLDC, and servo motors for ~6 RPM torque demands
- Validated reach envelopes and mechanical clearances
- Applied modular design for easy assembly and part reuse
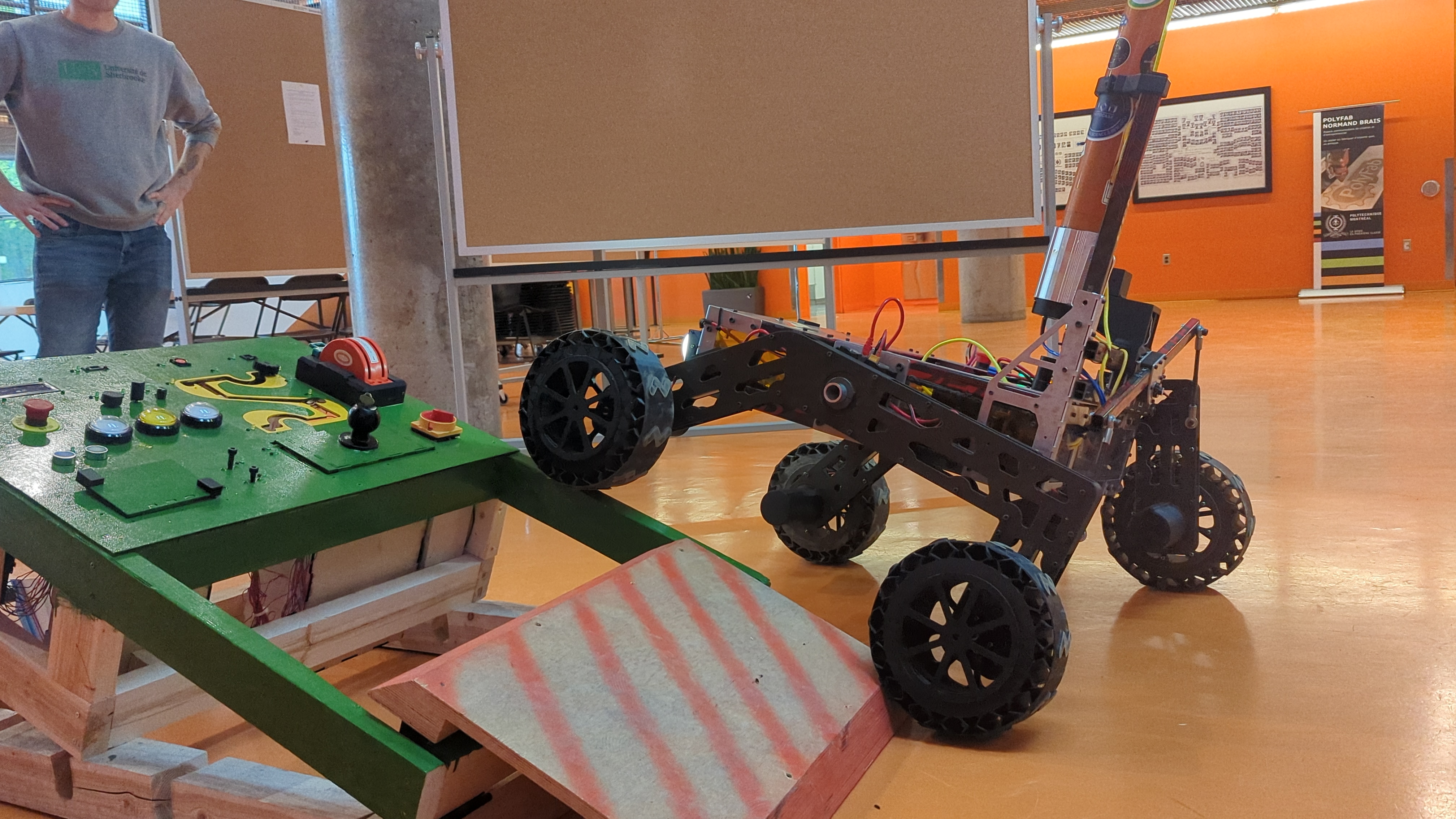
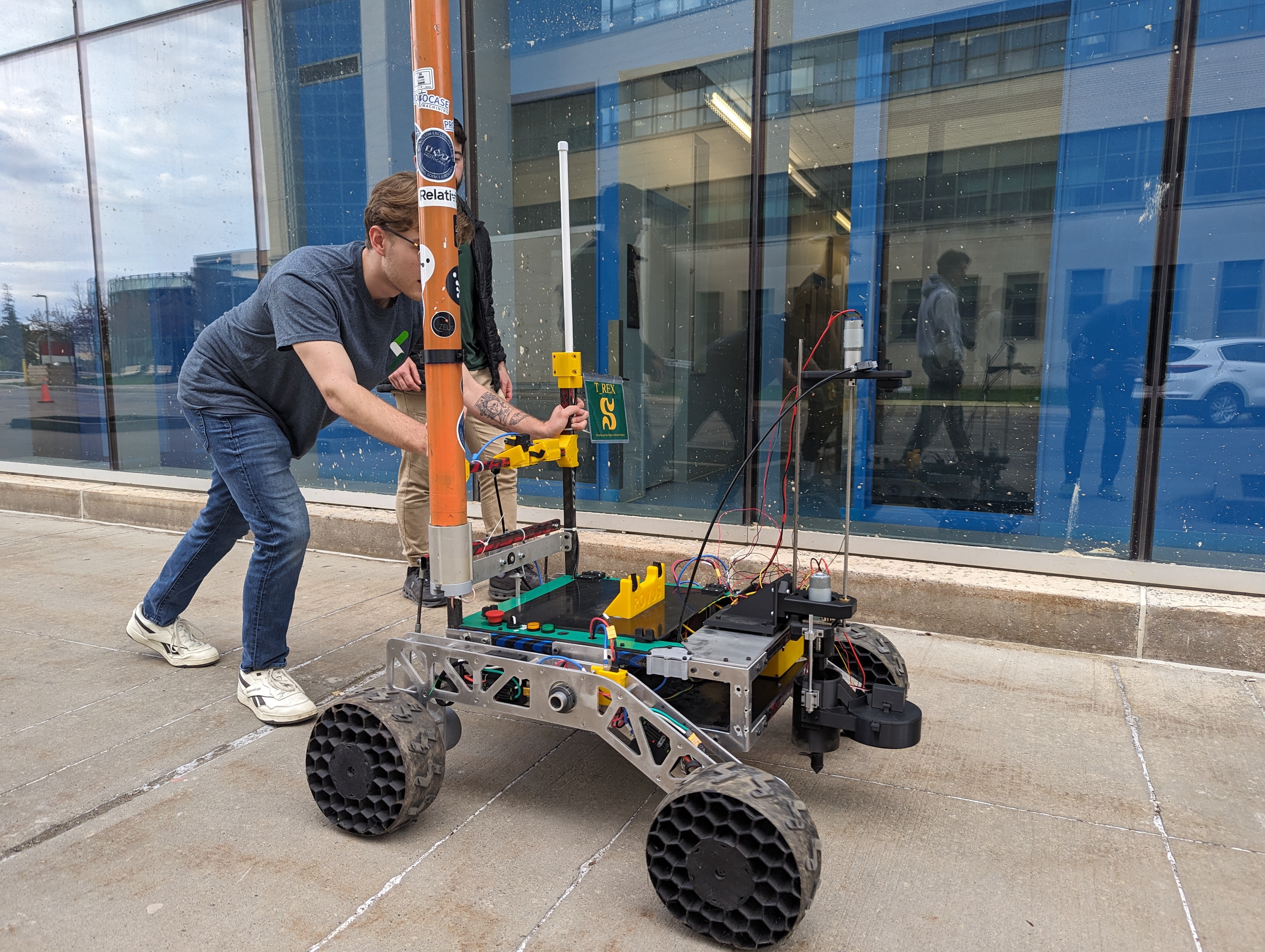
Suspension & Mobility
- Developed rocker-bogie chassis with carbon fiber and aluminum
- Designed custom wheels using PLA, TPU, and Nylon blends
- Tested traction and flexibility on varied terrain setups
Electronics Integration
- Integrated 4-layer PCBs into mechanical assemblies
- All logic handled by ESP32; full Mini-ATX PC onboard
- Planned mechanical fit, cable routing, and cooling